æ¼íÔȤVinod CherianȘMathWorks ¥¥Åg(sh´Ç) IðNÈ¥Ø
ó«ÉŠæÆŸI(l´¨ng)Æ·à(n´´i)í«¤üø¼Æ¯ýà¨C(j´ˋ)øóçáÖ
ïƺîïƺêØȘóàò¿ó«ÉøóåšSèäÂñâà(c´´)ñÙ¿ÎáÉí«¤ü秼§y(t´₤ng)ó«ÉçæÝP¢Äøóüç§y(t´₤ng)øÛøÅȘâ»àÓȘøóÆñâÝÏùâüç§y(t´₤ng)¤ë ¢Ø»ê΢Äøóüç§y(t´₤ng)àÓ§þƒªØîçûç§å—(qi´Âng)È˜í«¤üêùñâà(c´´)ñÙ¿ÎáÉÀÈûâ½½¥Ø¿¨ôñ§£ë´¯ýਿÉâÚƒøÈ´NHTSAÈˋÔM(j´˜n)Ø£ý§ëóÔM(j´˜n)êùÔ@ñNÖ
ïȘ(qi´Âng)øó؈úµùªÆÅ 2011 áõ¢Ÿó«É¤ë¡■Åôçᢟò§ÝÄÚéððñâà(c´´)ñÙ¢Äøóó¼ÀÈÔ@Ú؈úµØå NHTSA ÎÆÖà(c´´)ñÙé—æýçáòô¿òç(sh´Ç)±(j´Ç)ñøö—ÕØâ±(j´Ç)ÀÈâ»àÓȘ¡ª±(j´Ç) NHTSA çὥاy(t´₤ng)Æécñøö—øÅÅáäÿˋçáç(sh´Ç)±(j´Ç)ȘåÖ 2001 áõȘ¿ýÆÅ 10,138 àùùâÆÖà(c´´)ñÙé—æýòô¿òȘí¥Û(d´Àng)áõØ·òô¿òùâë—¢?c´´)ù?sh´Ç)çá 32%ÀÈòˋø¼Æ¯ýà¨C(j´ˋ)øó¢è§ççëÉïvà(c´´)ñÙçáÿL(f´Ëng)ŠUȘáѽpèìåÖ«ë—Àȧççëà(c´´)ñÙÿL(f´Ëng)ŠUçáñ§ñ´øÛØ£ƒëòú˜F(xi´Ên)ŠæÆñ(w´Ïn)Ñ´Åå¢ÄøóÈ´ESCÈˋȘ¡ª±(j´Ç)yꢤëŸA(y´Ç)ÆçáÉïv ŸB(t´Êi)Úˆ(y´ˋng)ÆûýŸÆøóÆÀÈ݃öáø¼Øˆ§Õ§Bò¿Æû£ªÆÖáÈÅëçáåO(sh´´)ÆȘÕÔ\(y´Çn)ÆÅëÑÁ¿ÎáÉÉÈ´SUVÈˋÕ_¯l(f´À)¤ëæåÆ(y´Ùu)£₤ ESCÀÈ
ó«É¤ë¢Äøóó¼áÈÅë
åÖ£ªÆÖáÈÅëçáåO(sh´´)ÆøÅȘ¤ùÅá¡éáŸòú¢èä(zh´ˆ)ÅÅçáØ(gu´ˋ)ñÑ£·áÈÅëȘù■ûÒò—êùüç§y(t´₤ng)çáÆB(t´Êi)ÅÅÕÀÈ¢èØåâ«Æû§(j´ˋng)Ô^·æCçáó«ÉáÈÅëȴ݃â»øÅÕ¡ÔÝÈíÌÑàçá SUV áÈÅëÈˋȘÿ@ø½§ççëéc¢Äøóó¼åO(sh´´)ÆüÁõP(gu´Àn)çáÕ_¯l(f´À)°è݃¤ërÕgÀÈ¢èâ«ÆûáÈÅëçáç(sh´Ç)æøñôíÌÚîŃ¢ÉïvÎý£ë˜ßD(zhu´Èn)ü·ýì¢Ä·çáñLj(y´ˋng)ȘýÂúØÇùŸyå¢èïpѽØæéeçÄåÖý£ë˜çáôñûÌÀÂïäËÅëä¤ëÉïvìÅåçà
Âç(sh´Ç)üôøÄë(f´Ç)ä(zh´ˆ)ÅÅÀÈÇùëãȘԢèØååÖúÑàŠò§¢Äøóüç§y(t´₤ng)çáÕ_¯l(f´À)éc·æCøÅò¿ÆûáÈÅëÀÈ
݃öáùªÆûçáó«ÉòúçðÅëçáøÅÅë SUVÀÈÉïváÈÅë¢èåÖ CarSim® øÅíØç§È˜Ô@òúØ£¢Ÿ˜F(xi´Ên)°èçáèäI(y´´)ó«ÉÆB(t´Êi)ñôí̿ʃÔÀÈÉïváÈÅëçáÅåáÉ¡ª±(j´Ç)yåç(sh´Ç)±(j´Ç)ÔM(j´˜n)ÅÅ·æCȘÔm¤üñôíÌÉïvåÖâ(y´Ân)øÄà(c´´)AÔ\(y´Çn)ÆüôçáñLj(y´ˋng)ÀÈÉïváÈÅëƒÔÆÅèˆ(d´ý)êÂú¯ÑùØ¥ÉÀÂØ£ÆûÆÖøÏ°ø£èïdì|(zh´˜)ê¢çáÅᤵïSÀÈñúƒÅåç(sh´Ç)W(xu´Î)áÈÅë¢èÕ£èïdì|(zh´˜)ê¢À¡¼ïSÀ¡¼ïÀÂßD(zhu´Èn)ü·üç§y(t´₤ng)¤ëøóÆüç§y(t´₤ng)äÿˋæåÆèÑàÀÈÉïváÈÅë¢èò¿Æûý£ë˜çáÉïv
Âç(sh´Ç)Ø奯ôñṳ̂ëÙh(hu´Ân)ƒ°l¥±ÔM(j´˜n)ÅÅæåÑ´êxÀÈ
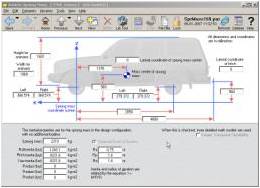
D 1Ȥò¿Æû CarSim Æû¶§ÓûÌåO(sh´´)øûÉïv
Âç(sh´Ç)ÀÈ
D 1 ÿ@òƒêù CarSim Æû¶§ÓûÌȘØ奯ÆûÆÖ(g´¯u)§´ÉïváÈÅëçáý¢ñøöÿâÚÉïv
Âç(sh´Ç)ÀÈ¢èá¢Äøóó¼
Âç(sh´Ç)øÅñøeÅß¡áÔ@Åˋ
Âç(sh´Ç)ȘØåÝÐyå¢Äøóó¼åÖý£ë˜Éïvl¥±üôçáÅÅÕȘâ»àÓȘأû«°ù¢ëÀÂÑÁû«°ù¢ë¤ë¡ÔøÄÅáçáúÕrÀÈ݃öáùªÆûçáÉïváÈÅëˆ(y´ˋng)ÆûçáßD(zhu´Èn)ü·ïàŠñ«¤ü NHTSA fishhook ýì¢Ä·È˜Ô@ñNù(bi´Ào)ò(zh´°n)·ÆûÆÖåu¿âÆB(t´Êi)Éïvñ(w´Ïn)Ñ´ÅåÀÈ݃yåçáåO(sh´´)Æá¢çáòúáÈMþ{þTåÖÝÉÕ_ôñûÌèüë£à£°—˜F(xi´Ên)çáíüçKöÿr¢èáÉýèàÀçáÅÅÆÀÈÎÆÖç(sh´Ç)æøñôíÌȘöØ?y´Ùu)?SUV áÈÅëåO(sh´´)Ñ´ßD(zhu´Èn)ü·ïàŠÈ˜·æCêùåÖ]ÆÅ ESC çáúÕrüôȘÉïv°—˜F(xi´Ên)à(c´´)ñÙÀÈ
¢Äøóó¼Õ_¯l(f´À)éc(y´Ùu)£₤
݃öáøÅùª˜F(xi´Ên)çá ESC ÝÉûãêùþ{þTçáýìæ¼Ï(d´Èo)øôçáý£¯ýà¨Éµwà(c´´)A¤ëà(c´´)£˜Ææ¼ÀÈù■áÉÎÉïˆ(y´ˋng)ÆûýŸÆøóÆȘáѽí{(di´Êo)í«Éµwà(c´´)A¤ëà(c´´)£˜ôòȘë˜ræŸÅÀ£₤Æè¢Äøóó¼æåƈ(y´ˋng)ÆûçáŠæÆøóÆùªÏ(d´Èo)øôçáÉïvùìÑà§ççëÀÈ öؘF(xi´Ên)çá ESC åÖà»ñN¢ÄøóáÈò§øÛÕgúÅQÀÈ¡ª±(j´Ç)ÉïvÔM(j´˜n)àŠÉØó ŸB(t´Êi)çáà»ñN¢èáÉíTØ·¥Ê£Ÿ¢ÄøóáÈò§È¤òÏàË ¢Ø»êÎÀÂà(c´´)AÔ^ÑàÀÂà(c´´)£˜Ô^ÑàÀÈáÈò§úÅQÔï¢ÄøóØ£§MÝàâ»-ñeñø-öÂñøÈ´PIDÈˋîa(b´°)ó¼È˜ù■¡ª±(j´Ç)ØîyꢤëŸA(y´Ç)Æçá
Âç(sh´Ç)í{(di´Êo)í«þ{þTÎÉïòˋ¥ÆçáøóƤêÎÀÈSimulink® øŘF(xi´Ên)çá¢Äøóó¼åO(sh´´)ƃÔÆÅêªÚ PID å—ØÌȘ¢èÕ(y´Ùu)£₤ ESC ÅåáÉѽÔM(j´˜n)ÅÅ¡■¡áÀÈ
åÖÇùáÈÅëøÅȘöØ¢èØåýÕ¢ÇÉïßD(zhu´Èn)ùìÀÂøóƤêÎÀÂɵwà(c´´)AÀÂà(c´´)£˜ôò¤ë£˜ØóôòÀÈá°ÅˋÉïv ŸB(t´Êi)òúë´Ô^¢èÆû¼¡Åó¼ç(sh´Ç)±(j´Ç)ŸA(y´Ç)yçáȘƒëüþåÖŠHÉïv¢Äøóó¼øÅØ£ÆȘѽóðù«Ø£Åˋ ŸB(t´Êi)òúë´Ô^ØîyꢤëŸA(y´Ç)Æ
Âç(sh´Ç)øÛÕgçáç(sh´Ç)W(xu´Î)õP(gu´Àn)üçŸA(y´Ç)yçáÀÈÉïvùìÑàòúë´Ô^öÇøóÆÉïçáÉï󧃪ßD(zhu´Èn)ùìŸA(y´Ç)yçû°—çáÀÈò¿Æûçëë´Vý´ó¼ÚáÈMåÖØîyê¢çáÉïßD(zhu´Èn)ùìüôÉïvTÅåçáÅÏ¿«È˜ÝÉûãåÖü·ùáÉïˆ(y´ˋng)ÆûøóƤêÎrȘÉùìyê¢øç°—˜F(xi´Ên)ý£Ç_Ñ´øçÀÈ
àÓ¿«ý£ò¿Æûåšr¡Ô¯¤çἡÅó¼È˜Éµw£˜ØóôòÂòúØ£ŠyØåøݧÆyê¢çá
Âç(sh´Ç)ÀÈöؘF(xi´Ên)çá ESC Âë´Ô^Øîyê¢çáà(c´´)£˜ôòÚŸA(y´Ç)yɵw£˜ØóôòÀÈɵwà(c´´)A§úòúë´Ô^ÂMü·¥ÆùìÑàécɵwà(c´´)A§úüÁõP(gu´Àn)ô(li´Ân)çá¼Ôf¤₤ç(sh´Ç)ŸA(y´Ç)yçáÀÈåÖɵwà(c´´)A§úäÆÖø¡Ñ´åO(sh´´)Æüßøóà(n´´i)rȘÔ@¼Ôf¤₤ç(sh´Ç)òúÆÅÅÏçáÀÈë´Ô^Ç_ÝÈ(y´Ùu)£₤ùÐñ´ÂåÖŸA(y´Ç)yçáɵwà(c´´)A§ú°˜°—åO(sh´´)Æüßøór΢Äøóó¼òˋØåâ(y´Ân)¡þæ¼ÆûȘ¥Ç¢èí¿òƒ°—ȘöØýÂý£ÅÒ؈áÉò(zh´°n)Ç_ŸA(y´Ç)y°˜°—åO(sh´´)ÆñѺçáɵwà(c´´)A§úçáŸA(y´Ç)¿âùÐñ´ÀÈطѽȘöØ¢èØåÿ@ø½¤£₤óíë´Éïvýìæ¼l¥±üôçáɵwà(c´´)A§úŸA(y´Ç)¿âùÐñ´ÀÈ
ø¡Ñ´êù¢Äøóó¼§Y(ji´Î)(g´¯u)øÛ¤µÈ˜üôØ£Úàöí(w´Ç)ƒëòúí{(di´Êo)(y´Ùu)¢Äøóó¼å—ØÌȘØåMæÐåO(sh´´)ÆÅÒúµÀÈàÓ¿«]ÆÅáÉ·Øåüç§y(t´₤ng)£₤ñ§ò§·çááÈÅëȘ¿Ê°ä봰ȃë؈ØâìáÔ^àËçáÉïv°äÅ·øŨ@çûçáøˆæRȘ£·íÔëÑàŠÇµê¢rÕgàËLåȘë´Ô^çâôñ·í{(di´Êo)(y´Ùu) PID îa(b´°)ó¼çá
Âç(sh´Ç)øçÀÈ£ªÆÖáÈÅëçáåO(sh´´)Æò¿ÇùÔ^°ä[ûêùÆý¥±çáôÕˋȘѽòúò¿ÆûáÈÅëÚä§ù¼åO(sh´´)Æ¢íÕgÀÈë´Ô^ÂÔ@ÅˋáÈÅëéc£ªÆÖæåÆ(y´Ùu)£₤çáñ§ñ´üÁ§Y(ji´Î)¤üȘ¿Ê°ä¥Ç¢èÿ@ø½pèìë´Ô^åÙÅ룷ñôíÌÕ_í¿ñݘyåçáÅÒúµÈ˜¨@çûæŸ(y´Ùu)çá¢Äøóó¼å—ØÌÀÈ
ÎÆÖÔ@ñNˆ(y´ˋng)ÆûȘ(y´Ùu)£₤ùÐñ´òæüà¢Äøóó¼å—ØÌåO(sh´´)øûÕêÐȘ؈íØç§ÝÈæCüç§y(t´₤ng)äÆÖåO(sh´´)ÆüßøóøÛà(n´´i)çáæŸ(y´Ùu)¢Äøóó¼å—ØÌȘ¿ýÅÒÔM(j´˜n)ÅÅǵ¥s 100 Çöç■ǺȘÆùÐrÕg¥sÕ 4 ñøÓÀÈç■Ǻò§åÍeñ´tÅÒ؈ûÉ¥₤çáàù¿ÊyåȘ¥ÇÝÐyåòúëõਢèøÄë(f´Ç)çáȘѽúØí{(di´Êo)(y´Ùu)Ô^°äøÅçáà(c´´)ñÙý£±ÎÉïvÏ(d´Èo)øôàö¤öp¤ÎȘæ—üÁë˜ç(sh´Ç)ê¢çáyåÆûâ»ùªÅÒçárÕgØý°˜Ô^ 4 ÅÀrÀÈåÖ˜F(xi´Ên)Ǻ PC èüØåç(sh´Ç)æøñ§ò§ñôíÌØ£ÇöÕr 10 ûŠçá NHTSA fishhook ýì¢Ä·HÅÒý£ç§ 3 ûŠÓçárÕgȘýÂúØ¢èØåoüßøóçÄøÄë(f´Ç)Șѽý£ÇÌåÖécçâôñ·ÆÅõP(gu´Àn)çáÕ_ðNÀÈ
åÖÇùáÈÅëøÅȘöØØˆÕ ESC øÅçá PID îa(b´°)ó¼ÊíØæŸ(y´Ùu)¢Äøóó¼å—ØÌȘÝÈæCÉïvçáɵwà(c´´)ñÙ§úÀ£˜Øóôò¤ë£˜Øó§úäÆÖäÄÑ´çáåO(sh´´)ÆüßøóøÛà(n´´i)Șë˜ræŸÅÀ£₤Ø·ýŸÆøóÆØ»óÞçáùìÑàpòÏÀÈêªÚ¢èí{(di´Êo)(y´Ùu)çáå—ØÌäÿˋêù§■¤¾oüßñN¢Äøóó¼å—Ø̧M¤üȘåÝMoÔzçáyå椾òúý£¢èáɘF(xi´Ên)çáÀÈSimulink® Response Optimization™ åòåSØåDÅö£₤ñ§ò§åO(sh´´)øûüç§y(t´₤ng)ÅÒúµÈ˜üßøóɵwà(c´´)ñÙ¤ëÉïv£˜ØóȘë˜ræŸÅÀ£₤ ESC øóÆçááÉê¢pòÏÀÈø¡Ñ´ÅåáÉù(bi´Ào)ò(zh´°n)øÛ¤µÈ˜£ªÆÖ(y´Ùu)£₤çáâ»°äÂæåÆí{(di´Êo)í«
Âç(sh´Ç)Șò¿ÉïváÉ·åÖoà(c´´)ñÙçáúÕrüôä(zh´ˆ)ÅÅ fishhook ýì¢Ä·ÀÈ
öØÂÅÒ؈üßøóçáÅéääÿˋ§o Signal Constraint áÈKȘýÂØåDÅö£₤ñ§ò§åO(sh´´)øûóðåO(sh´´)ÆüßøóȘàÓD 2 çáùÛó§ƒùªòƒÀÈöØÔxþêùØåüôÅÒúµÈ´üßøóÈˋÚMæÐåO(sh´´)Æá¢ù(bi´Ào)Ȥ
ÀÊ Éµwà(c´´)ñÙ§úüßøóÕ +/-11.5 ÑàÀÈ
ÀÊ Éïv£˜Øó§úüßøóÕ +/-11.5 ÑàÀÈ
ÀÊ æŸÇµ£˜ØóôòåO(sh´´)øûÕ +/-37.25 Ñà/ûŠÀÈ
ÀÊ Fishhook ýì¢Ä·§Y(ji´Î)ò½rçáæŸçëÉùìåO(sh´´)øûÕ 10 ÆÂâÿ/ÅÀrÀÈ
ÀÊ ñôí̧Y(ji´Î)ò½çárÕgåO(sh´´)øûÕ 10 ûŠÀÈ
ÕÝÉûãطأ§Mý£í»Ç_çá¢Äøóó¼å—ØÌøçѽÏ(d´Èo)øôçáÉïvà(c´´)ñÙñôíÌäÃåÓ§Y(ji´Î)ò½È˜ÅÒ؈ø¡Ñ´ñôíÌrÕgüßøóÀÈ
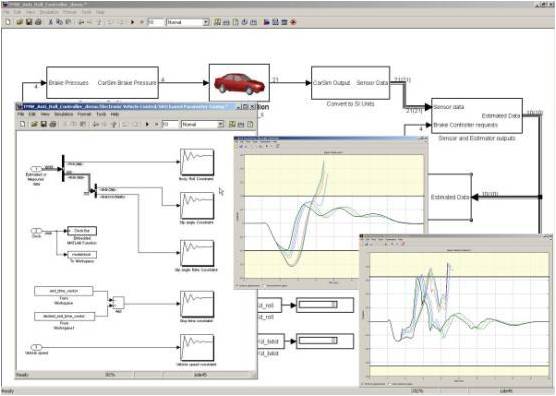
D 2Ȥäÿˋ§o Signal Constraint áÈKçáÅéäÈ´æµà(c´´)ÈˋØ奯(y´Ùu)£₤Ô^°äøÅà(c´´)ñÙéc£˜ØóôòÅéäçáæ£₤È´ÆØà(c´´)ÈˋÀÈ■Sè¨
^(q´Ý)ƷǺÝÚý£åòåSçáÅéäøçñѺÀÈ
û¢ÚÅéäüßøóѥѴêxêùÅéäçáñøÑöƒÅåèüüߤëüôüßÀÈåÖ(y´Ùu)£₤Ô^°äøÅȘ¢Äøóó¼å—ØÌÂÝ£í{(di´Êo)í«È˜ñôíÌåÖç■ǺîÙÙh(hu´Ân)øÅøÄë(f´Ç)Ô\(y´Çn)ÅÅȘøÝøêñôíÌÅéäMæÐø¡Ñ´Ô
§Ó£·(y´Ùu)£₤â»°äoñ´§ãQŸ}ÀÈD 2 ÿ@òƒ°—åÖ(y´Ùu)£₤ùÐñ´ç■Ǻçû秧ãQñ§¯¡çáÔ^°äøÅà(c´´)ñÙÅéä¤ë£˜ØóôòÅéäçáæ£₤ÀÈåÖ§ãQÇùŸ¢èÅÅÅåŸ}rȘ(y´Ùu)£₤ùÐñ´ÂÆùÐÝ£üßøóçáÅéäéc¡¼ñøÑöƒÅåÔ
§ÓøÛÕgçáæŸÇµÆÅñ«äƒÁŠxÀÈë´°ÈúÕrüôȘÄ(f´Ç)ç(sh´Ç)øçÝÚòƒüÁˆ(y´ˋng)çáüßøóØîMæÐÀÈ
(y´Ùu)£₤ùÐñ´ò¿Æûéc¡¼Ô
§ÓøÛÕgçáÆÅñ«äƒÁŠxÚ¡■Åô¢Äøóó¼
Âç(sh´Ç)ÀÈåÖ(g´¯u)åš(y´Ùu)£₤Ÿ}rȘ(y´Ùu)£₤ùÐñ´ùªýèÆûçáñ§ò§ˆ(d´ý)êÂÆÖÆùÐüç§y(t´₤ng) ŸB(t´Êi)çáç(sh´Ç)øç§ãñ´ÀÈ¢èØåò¿Æû£ªÆÖäïÑࣷñú£ªÆÖäïÑàçáñ§ñ´È˜â»àÓÔz¼ùÐñ´ÀÈåÖ݃â»øÅȘ§oÑ´¢Äøóó¼çáúÅQäÄÅå¤ë¤µâm(x´Ç)çáñú󧣘ÅÅÕȘ£ªÆÖäïÑàçá§ãñ´¤ÉŠyçû°—ਃø§ãQñ§¯¡ÀÈطѽò¿ÆûêùáÈò§ùîù¼ùÐñ´ÀÈåÖÜ`øÅȘöا´æhåÖÑÁñNŸÅëçá(y´Ùu)£₤ñ§ñ´øÛÕgúÅQȘØåÇ_ÝÈ(y´Ùu)£₤ùÐñ´áÉ·íØç§à¨ƒøOøçȘýÂéé°»òí¢ç§°è݃¤₤ç(sh´Ç)ƒøý¢æŸÅÀøççáúÕrÀÈ
¢Äøóó¼·æCécÅåáÉ·æC
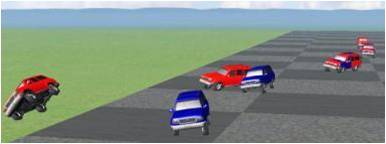
D 3 ØåÅöüµçáñ§ò§í¿òƒêù(y´Ùu)£₤¤µçá ESC ÝÉûãÉïvà(c´´)ñÙçáÅåáÉÀÈ¥tè¨çáó«ÉöÇéðð¢Äøóó¼È˜¯l(f´À)èºêùà(c´´)ñÙȣѽù{(l´Ân)è¨ó«Ééððêù§(j´ˋng)Ô^(y´Ùu)£₤çá¢Äøóó¼ÀÈë´Ô^Ô@ÆçáñôíÌȘö؃ëáÉíæC¢èÝÉûã SUV à(c´´)ñÙçá¢Äøóó¼åO(sh´´)ÆȘáѽOǵçÄpèìêùçâôñí{(di´Êo)(y´Ùu)çáÇöç(sh´Ç)ȘÝÉûãëõà¨ØâìŠHÉïvyåÀÈ
D 3ȤåÖØå 50 ÆÂâÿ/ÅÀrçárùìüôä(zh´ˆ)ÅÅ fishhook ýì¢Ä·rȘéðÆÅ ESC ¤ëöÇéðÆÅ ESC çá SUV çá¢èØ£₤ÅÅÕîïòƒÀÈù{(l´Ân)è¨çá SUV éððêù§(j´ˋng)Ô^(y´Ùu)£₤çá ESCȘ¥tè¨ SUV öÇéðð ESCÀÈ
¤µâm(x´Ç)ý§µE¤ë§Y(ji´Î)ò½íZ
åÖåO(sh´´)Æ¿Êæ¼øÅȘ¤µâm(x´Ç)ý§µEë´°ÈèÌ¥¯Â¢ÄøóùÐñ´á Simulink áÈÅëßD(zhu´Èn)ÕåÖçæÝP¢Äøóó¼èü˜F(xi´Ên)çáǺÇaÀÈ؈åÖÉïvëÑÛa(ch´Èn)øÛú¯ä(zh´ˆ)ÅÅåO(sh´´)Æ·æCȘ¢èâ«Æû¥₤°è£₤¢šùìåÙÅëåO(sh´´)Ƥ믊öÿÈ´HILÈˋñôí̿ʃÔȘë´Ô^éðÆÅyê¢xÝÚçáåÙÅëó«ÉÔM(j´˜n)ÅÅǺÇaçáçâôñyåÀÈ¢èØåò¿ÆûèºÛa(ch´Èn)ǺÇa躰è¿ÊƒÔÚ˜F(xi´Ên)ùÐñ´È˜¨@çûåÖåÙÅëó«Éèü˜F(xi´Ên)çáǺÇaȘÔ@ñNñ§ñ´áÉ·æŸÅÀ£₤ßD(zhu´Èn)£₤Ô^°äøÅçáÍeí`ȘýÂÔM(j´˜n)Ø£ý§¥ÆùìÉïvÕ_¯l(f´À)Ô^°äÀÈÇùëãȘò¿ÆûÇùáÈÅëȘ¿Ê°äÔ¢èåÖý£ë˜çáÉïvéðøûüôyå¢Äøóó¼È˜øÏ°ø¢šùìÅß¡áȘæŸÇµ£₤¢Äøóó¼åO(sh´´)ÆåÖÑÁñNÉïv°äÅ·øÅçáøÄÆûÀÈ
݃öá(qi´Âng)í{(di´Êo)êù£ªÆÖáÈÅëçáåO(sh´´)ÆåÖÕ_¯l(f´À)§ãQà(c´´)ñÙŸ}çá ESC ùÐñ´øÅçáˆ(y´ˋng)ÆûȘÇùëãÔí¿òƒêùØ£ñN¡ª±(j´Ç)åO(sh´´)ÆÅÒúµæåÆí{(di´Êo)(y´Ùu) ESC çáñ§ñ´ÀÈ